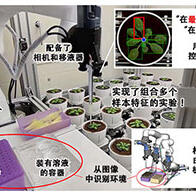
旨在实现“与人类共存、协同工作的Partner Robot”的目标,丰田汽车正在致力于研制“灵活的机器人”――扭矩伺服机械手臂。
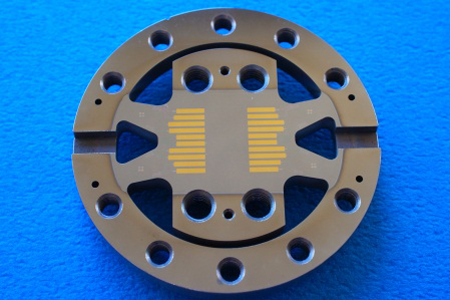
Cr-N薄膜扭矩传感器
扭矩伺服机械臂能够高速回应外力,提高了撞击安全性能,并且可以进行遥控的细小作业。其工作原理是通过具有高感度、高强度的温度操控,以及优质S/N比的“Cr-N薄膜扭矩传感器”(照片)。此外,通过降低减速器的摩擦及机械臂的重力负荷,可以用较小的力进行操控。通过7轴关节进行灵活地协调动作,能够完成各种指定的工作。

与东京大学中村研究室共同研究
随着这项技术的进一步开发,有可能运用于制造业、医疗、看护福利、危险作业、宇宙开发等各个领域。
|
以往较僵硬的机器人 |
即将问世的灵活机器人 |
|
◆不管任何命令都要在指定的位置进行
(位置操纵基础的机器人) ◆由于碰撞,损坏周围的东西 ◆撞伤人类,损坏自身零部件 |
●能够应对同环境之间产生的力。
(扭矩伺服基础的机器人) ●能够避开碰撞 ●能够适应未知的环境 ●人类能够手把手地进行操作 |

文/佐野健太郎 图/丰田汽车